
Самодельный вариометр для радиоуправляемого планера
| Разрабатываю
вариометры - дешево, быстро,
качественно. Выбрать любые два пункта из трех... |
Версия первая, "на скорую руку"
Все было прямо-таки по Пушкину:
Уж небо
осенью дышало, - а я только
вошел во вкус полетов на
самодельном двухметровом
электропланере.
Уж реже солнышко блистало,
- и термики на моем любимом поле
становились все слабее.
Короче становился день,
- и времени на полеты оставалось все
меньше.
Лесов таинственная сень
С печальным шумом обнажалась.
- лирику пропустим.
Гусей крикливых караван
тянулся к югу: приближалась
- вместе с гусями куда-то срулили
крылатые хищники, которые всегда
показывали мне, где есть отличные
потоки.
Довольно скучная пора; - понятно,
зимой особо не разлетаешься.
Стоял ноябрь уж у двора. - на
моем дворе стояло конкретно 3-е или
4-е октября, когда я впервые испытал
свой вариометр.
Удивительно, что еще в XIX веке великий русский поэт предвидел, как трудно начинающему планеристу обходиться осенью без вариометра. Мой GPS Logger оказался весьма полезен для послеполетного анализа, но во время полета он ничем не мог мне помочь, а опыта поиска слабых осенних термиков у меня явно не хватало. На высотах более 100 метров я просто не мог оценить скорость подъема или спуска, если она была небольшой. Поэтому я решил по-быстрому сделать вариометр из того, что было под рукой.
Очевидно, что от вариометра требовалось: измерять на борту вертикальную скорость, передавать ее значение на землю и, наконец, это значение в том или ином виде доводить до сознания заинтересованного субъекта. Причем делать все это желательно с периодичностью не менее 2-4 раз в секунду и с точностью измерения скорости не хуже 0.1 м/с. (Строго говоря, еще полезнее было бы измерять не только вертикальную, но и горизонтальную воздушную скорость, чтобы по ним вычислять изменение полной энергии, а не только потенциальной. Но эта возможность в версию первую "на скорую руку" не вписывалась).
А) Измеряем вертикальную скорость.
Традиционно вертикальная скорость определяется по изменению давления воздуха за бортом. Известно, что на малых высотах при температуре около +20С подъем на 1 метр вызывает понижение атмосферного давления примерно на 12 Па и наоборот. Следовательно, разность давлений при подъеме или спуске со скоростью 0.1 м/с и с периодом измерения 0.25 сек составляет 0.3 Па - это и будет требуемая разрешающая способность при измерении давления. У меня имелись в наличии датчик абсолютного давления Motorola MPXA4115A и датчик относительного давления Motorola MPXV5004G. Чувствительность MPXA4115A составляет 46 мВ/кПа, соответственно, 0.3 Па будет соответствовать 14 мкВ выходного напряжения. Т.е. требовался АЦП с разрядностью 18-19 бит. У меня же под рукой был только 10-разрядный АЦП в составе Atmel AVR. Кроме того, я опасался, что шумы датчика будут значительно больше требуемой разрешающей способности. Поэтому я решил сначала попробовать использовать датчик относительного давления, имеющий чувствительность в 20 раз выше, чем MPXA4115A. Идея заключалась в том, чтобы заткнуть вход высокого давления датчика пробкой, создав объем с неким опорным давлением, относительно которого уже проводить измерения. Что-то типа этого:
Идея оказалась
совешенно не жизненной.
Естественно, я ожидал, что опорное
давление будет зависеть от
температуры, но я ожидал плавных,
степенных изменений, не слишком
влияющих на измерение производной
высоты. А они (изменения) оказались
настолько резкими и значительными
(даже от мизерного саморазогрева
датчика), что о нормальных
измерениях не могло быть и речи.
Тогда я решил несколько
модифицировать систему датчика, а
именно - сделать в полости опорного
давления небольшое отверстие,
чтобы измерять только переменную
составляющую высоты. Эксперименты
с подбором объема полости и сечения
отверстия также не дали хорошего
результата, и все по той же причине -
значительные колебания давления в
опорном объеме. Таким образом,
пришлось вернуться к использованию
датчика абсолютного давления.
На каком-то парапланерном сайте я
подцепил расписанную в радужных
тонах мысль использовать в
вариометре датчик абсолютного
давления с
усилителем-дифференциатором. И
хотя на этот счет у меня были
большие сомнения, я решил
попробовать такое включение. Мои
опасения подтвердились - я не смог
подобрать приемлемые постоянную
времени дифференциатора и АЧХ
усилителя. Либо выход усилителя был
забит шумами датчика, либо было
невозможно измерять малые
скорости. Наконец, я пришел к
довольно очевидному решению -
использовать датчик абсолютного
давления и дифференциальный
усилитель постоянного тока с
относительно большим
коэффициентом усиления. Понятно,
что это требовало наличия
источника регулируемого опорного
напряжения, но реализовать его
большой проблемы не составляло. Так
же было очевидно, что большой к-т
усиления потребовал бы применения
прецизионных ОУ, но, так как мне не
нужно было измерять абсолютную
величину давления, то медленный
дрейф параметров ОУ был в моем
случае вполне допустим. Результаты
первых же экспериментов оказались
весьма обнадеживающими - при
коэффициенте усиления около 30,
уверенно распознавалась
вертикальная скорость менее 1 м/с.
После оптимизации АЧХ усилителя,
параметров оверсэмплинга и
скользящих фильтров программного
дифференциатора, а также
параметров фильтра значения
вертикальной скорости удалось
выйти на желаемые характеристики
прибора. Вот, к примеру, на графике
показаны данные типичного теста -
изменения высоты на плюс 1.5 и минус
0.7 метра (уровень стола, вытянутая
вверх рука, уровень пола и опять
стол) со скоростью около 0.1 м/с:
Видно, что амплитуда шума вертикальной скорости не превышает 5-7 см/с и скорость в 0.1 м/с довольно хорошо выделяется на уровне шумов. Такие результаты меня вполне устраивали для начала (хотя потом по результатам первых полетов аппаратные и программные параметры устройства были несколько изменены).
Итак, нарисовалась такая схема:
Питание
подразумевается от отдельной LiPO 2S
батареи. Опорное напряжение
формируется с помощью ШИМ на выходе
OC1A. Аппаратный UART зарезервирован
для подключения GPS. Данные от
вариометра (и в возможной
перспективе обработанные данные от
GPS) выдаются наружу через
программный UART. EEPROM не установлена -
функции логгера переданы в
приемный модуль радиоканала.
Примечание: схемотехника и
элементная база НЕ оптимальны для
данной задачи. Просто под рукой
оказалось именно то, что оказалось.
Заказывать печатную плату для вариометра "на скорую руку" не было ни времени, ни возможности. Устройство было кое-как собрано на свободных платах гироскопа и датчика гувернера:
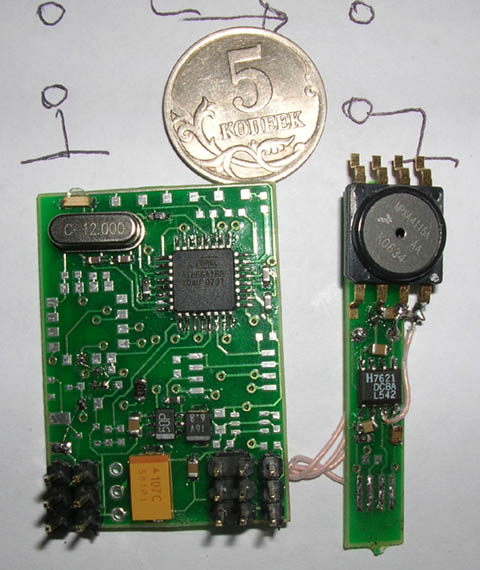
Б) Передаем данные на землю.
Тут все было просто. Поскольку наш цифровой радиоканал имеет возможность двусторонней передачи данных, то достаточно было добавить в систему команд новый тип кадра со значением вариометра, а в прошивку приемного модуля - процедуру приема данных от вариометра через UART и поддержку передачи этого кадра в эфир. Ну и, конечно, проводочком соединить модули между собой:
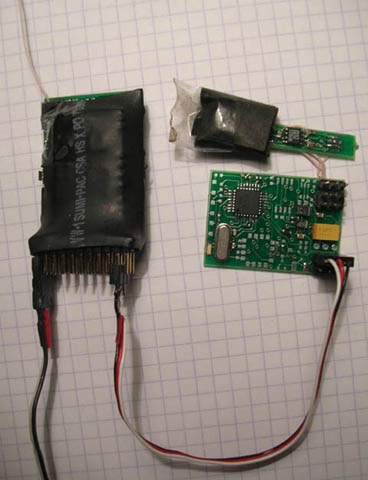
На фото видно, что на датчик давления надет светонепроницаемый экран, т.к. обнаружилась его некоторая чувствительность к свету.
В) Индикация.
Было понятно, что во время полета смотреть на какие-либо дисплеи неудобно и индикация нужна звуковая: либо речевым информатором, либо как в больших планерах - тоном разной высоты и периодичности. Из опыта виртуальных полетов на планере в симуляторах MS Flight SimulatorX и Condor я знал, что во "взрослых" вариометрах спуск индицируется непрерывным тоном с частотой примерно от 400 до 200 Гц и, чем больше скорость спуска, тем ниже тон. Подъем же сопровождается прерывистым тоном с частотой примерно от 400 до 1000 Гц, причем при увеличении скорости подъема повышается как частота тона, так и частота "пиков". При полете "в нуле" вариометр молчит. Такая звуковая кодировка мне показалась информативной и удобной, и я решил реализовать именно ее. Оставался открытым вопрос, какой конкретно блок будет отвечать за звуковую индикацию. Кандидатами были: мой модулятор, передающий модуль радиоканала или некий специально разработанный дополнительный модуль. В варианте "на скорую руку" мне лично было проще всего добавить эту функцию именно в свой пульт, поскольку там уже был свой излучатель звука. В систему меню модулятора был добавлен вот такой экран, отображающий параметры канала связи, значение вариометра в 0.1 м/с и таймер.

И, конечно, была реализована звуковая индикация с кодировкой, описанной выше. К сожалению, с таким аппаратным решением не получилось добиться плавного перетекания частоты непрерывного тона при спуске, и при изменении тона хорошо прослушивались ноты-ступени.
Таким образом, все было готово к летным испытаниям, и они были успешно проведены не то 3-го, не то 4-го октября. Мои опасения, что показания вариометра будут сильно шуметь в полете из-за влияния набегающего потока воздуха, не оправдались. Шумы прибора, укрытого в фюзеляже поролоном, в полете были нисколько не больше, чем на земле. Звуковая индикация оказалась информативной, хотя и несколько навязчивой из-за ступенчатых "переливов" тона при спуске. Полеты с вариометром показались мне более интересными - теперь были хорошо заметны мои ошибки при пилотировании, приводящие к неоправданной потере высоты, гораздо легче стало оценивать изменение высоты при больших удалениях. Наконец, мне удалось поймать и частично обработать пару-тройку совсем небольших пузырей и это доставило мне огромное удовольствие.
С другой стороны, в версии первой вариометра я могу отметить следующие недостатки: привязка исключительно к моей аппаратуре, шум показаний в 0.05-0.1 м/с, запаздывание показаний в 0.5-0.8 сек, навязчивость ступенчатой звуковой индикации, невозможность получения показаний производной полной энергии. К следующему сезону хотелось бы разработать и изготовить версию вторую.
© Вадим Кушнир (aka Vad64)